Projects
Performance of DeepReach on High-Dimensional Reachability Problems
With the continuous advancement in autonomous systems, it becomes crucial to provide robust safety guarantees for safety-critical systems. Hamilton-Jacobi Reachability Analysis is a formal verification method that guarantees performance and safety for dynamical systems and is widely applicable to various tasks and challenges. Traditionally, reachability problems are solved by using grid-based methods, whose computational and memory cost scales exponentially with the dimensionality of the system. To overcome this challenge, DeepReach, a deep learning-based approach that approximately solves high-dimensional reachability problems, is proposed and has shown lots of promise. In this paper, we aim to improve the performance of DeepReach on high-dimensional systems by exploring different choices of activation functions. We first run experiments on a 3D system as proof of concept. Then we demonstrate the effectiveness of our approach on a 9D multi-vehicle collision problem.
Poster; Partner: Stan Wu; Advisor: Somil Bansal
Mini Quadruped Robot
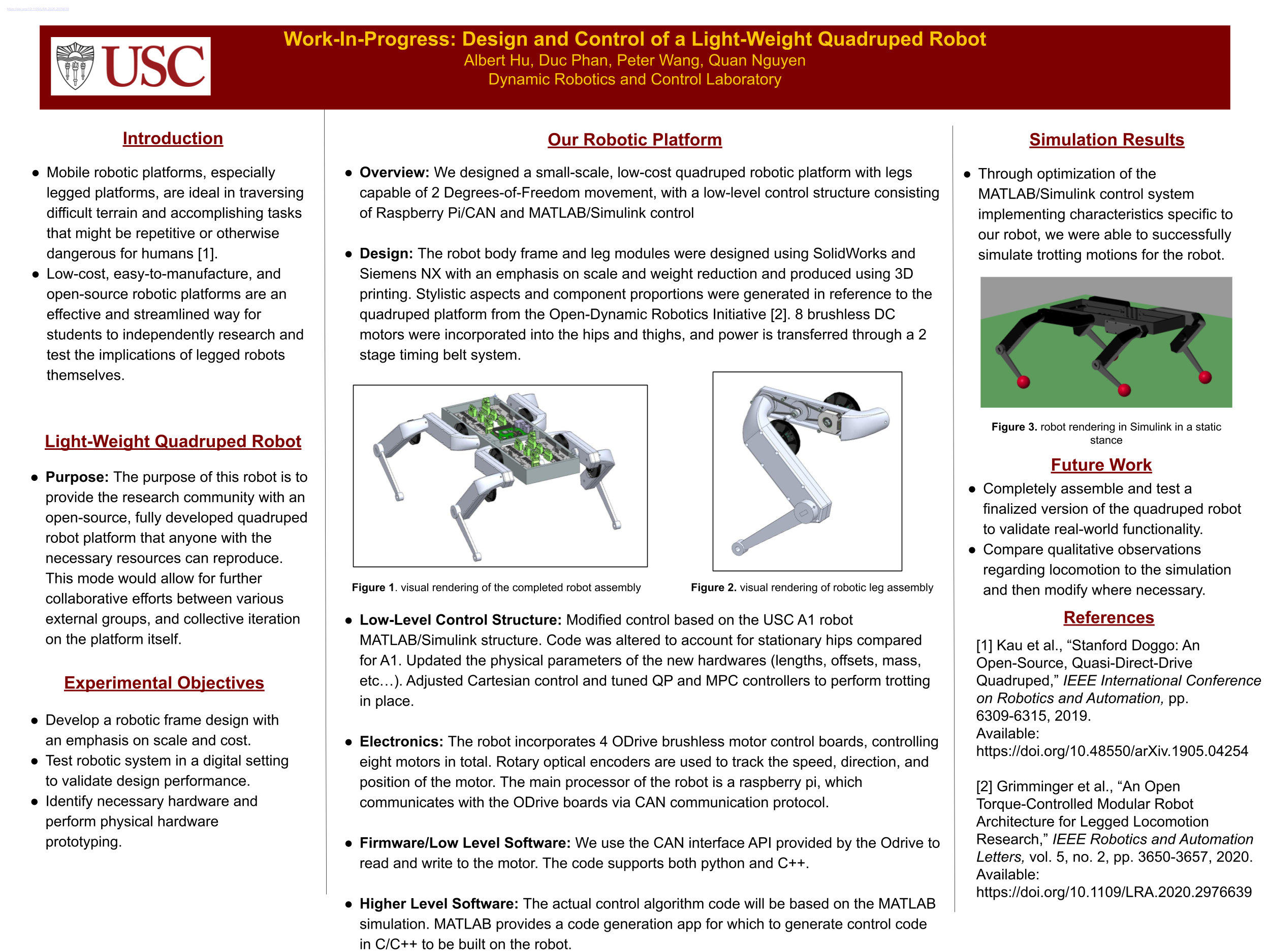
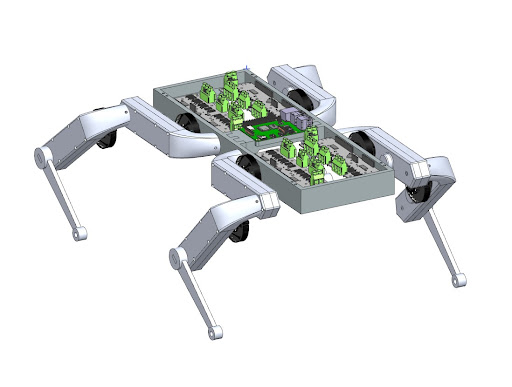
We designed a small-scale, low-cost quadruped robotic platform with legs capable of 2 Degrees-of-Freedom movement, with a low-level control structure consisting of Raspberry Pi/CAN/Odrive and MATLAB/Simulink control
The purpose of this robot is to provide the research community with an open-source, fully developed quadruped robot platform that anyone with the necessary resources can reproduce. This mode would allow for further collaborative efforts between various external groups, and collective iteration on the platform itself.
Poster; Partners: Albert Hu, Duc Phan; Advisor: Quan Nguyen
{kind=link}
PokerSC
This project aims to create an online poker website that supports basic grouping and gaming experience, with React as frontend and Spring Boot as backend.
Partners: Yutong Li, Jason Feng, Yuxuan Gao, Thomas Liang, Shaoxiong Yuan

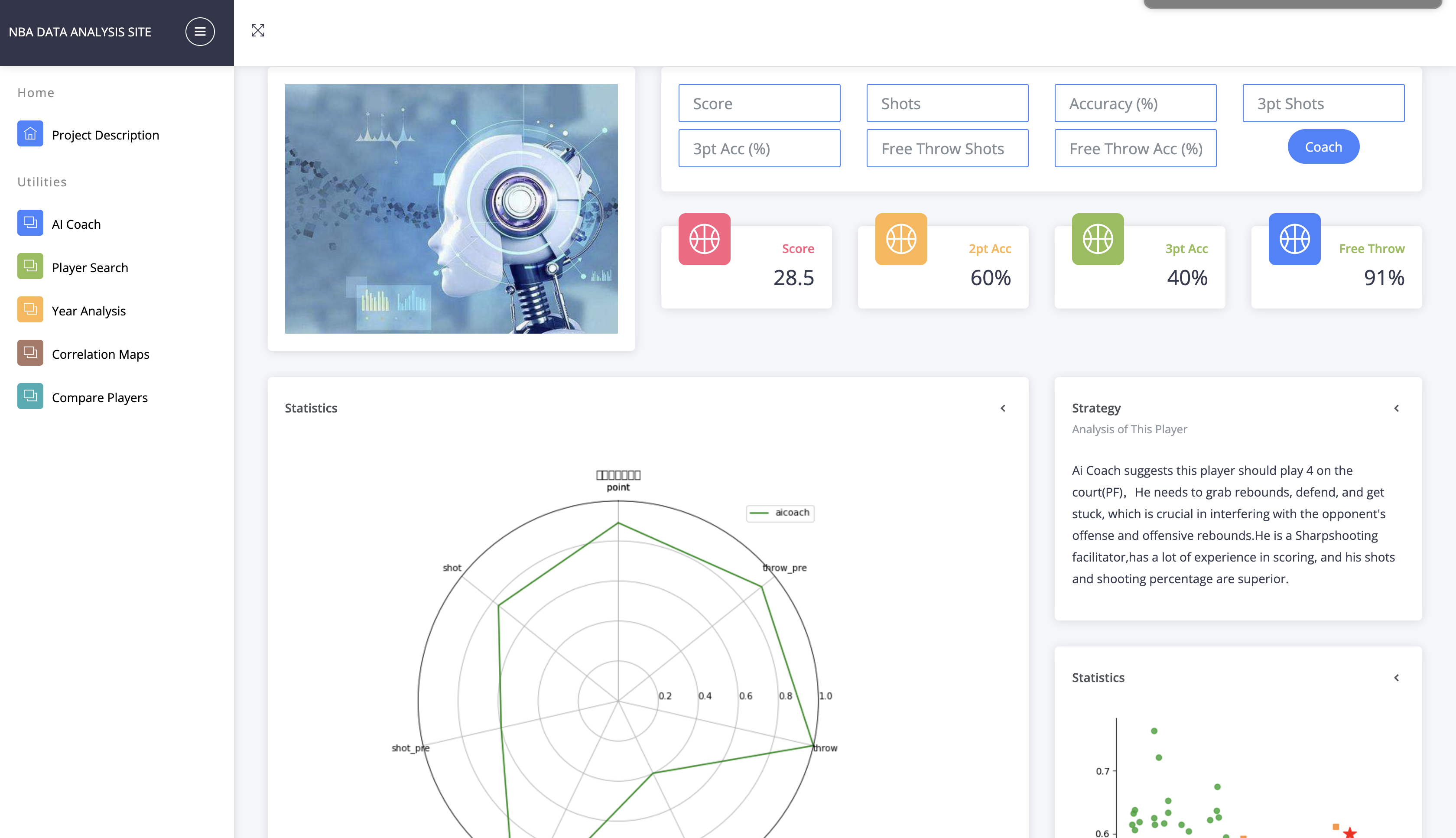
NBA AI Coach
This project aims to generate smart strategy and analyze performance based on data for individual NBA players, using Django and Scikit-learn.
ROS Lidarbot
A hobbyist project made to achieve autonomous driving using cheap materials that everyone can build on their own.
Implemented SLAM and OpenCV on the robot in ROS environment.
